1
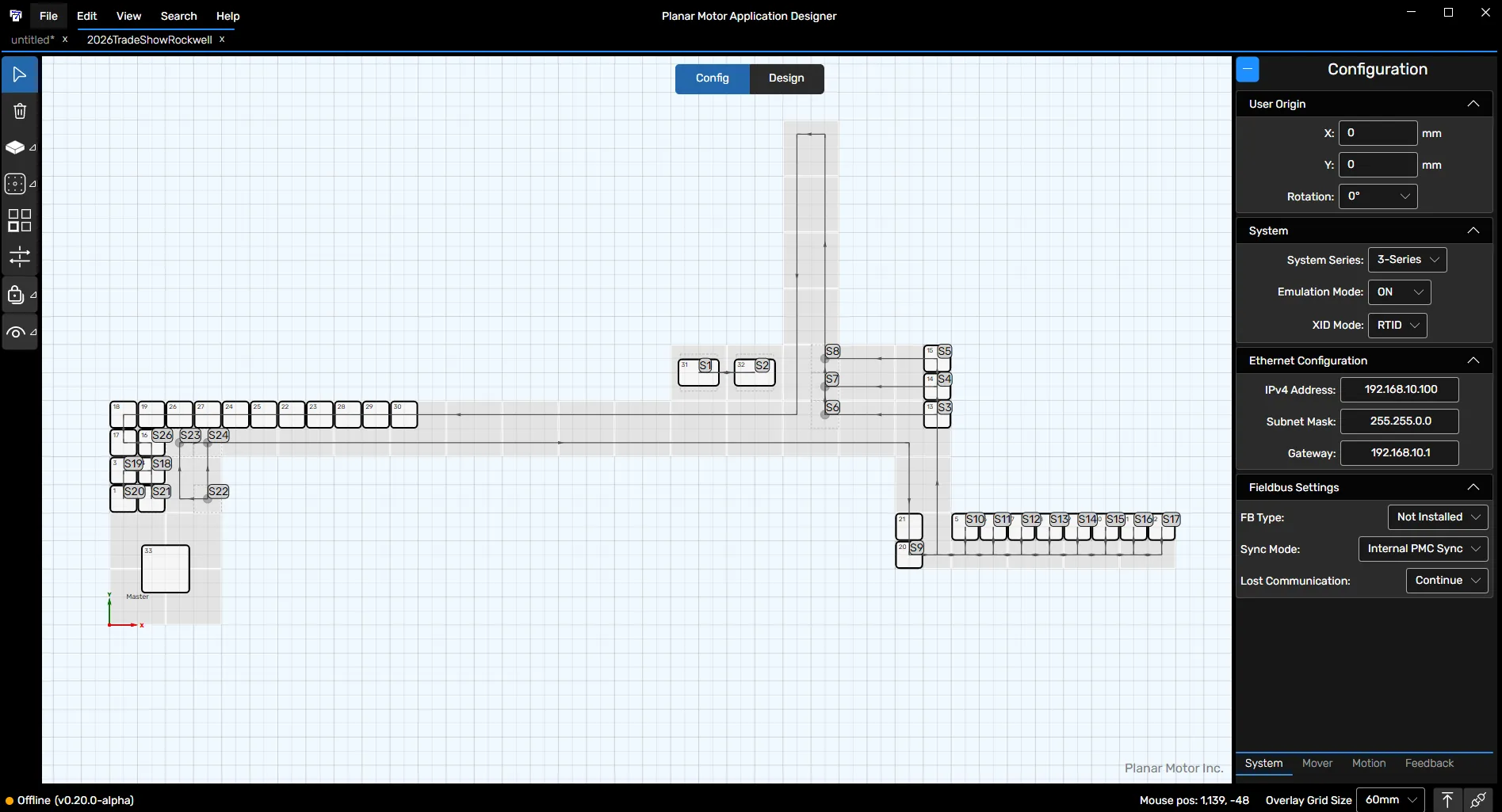
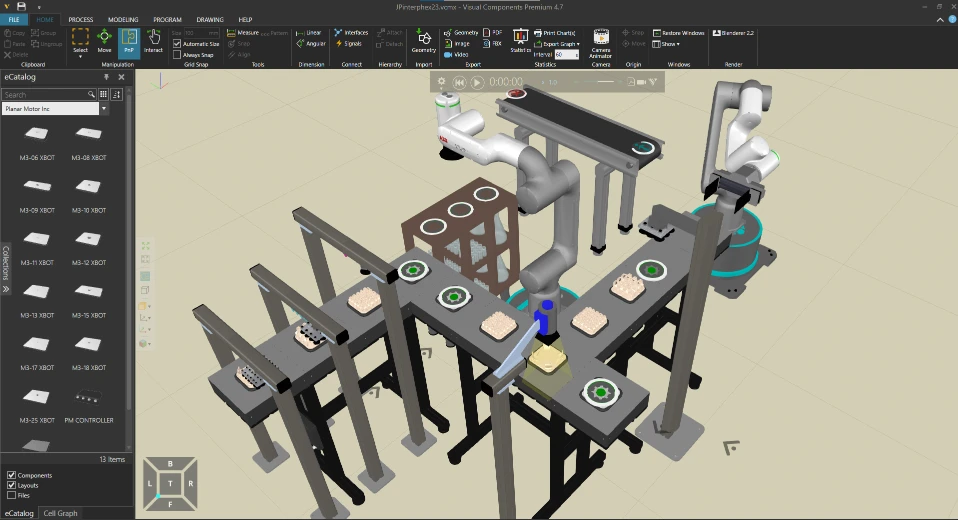
Design & simulate
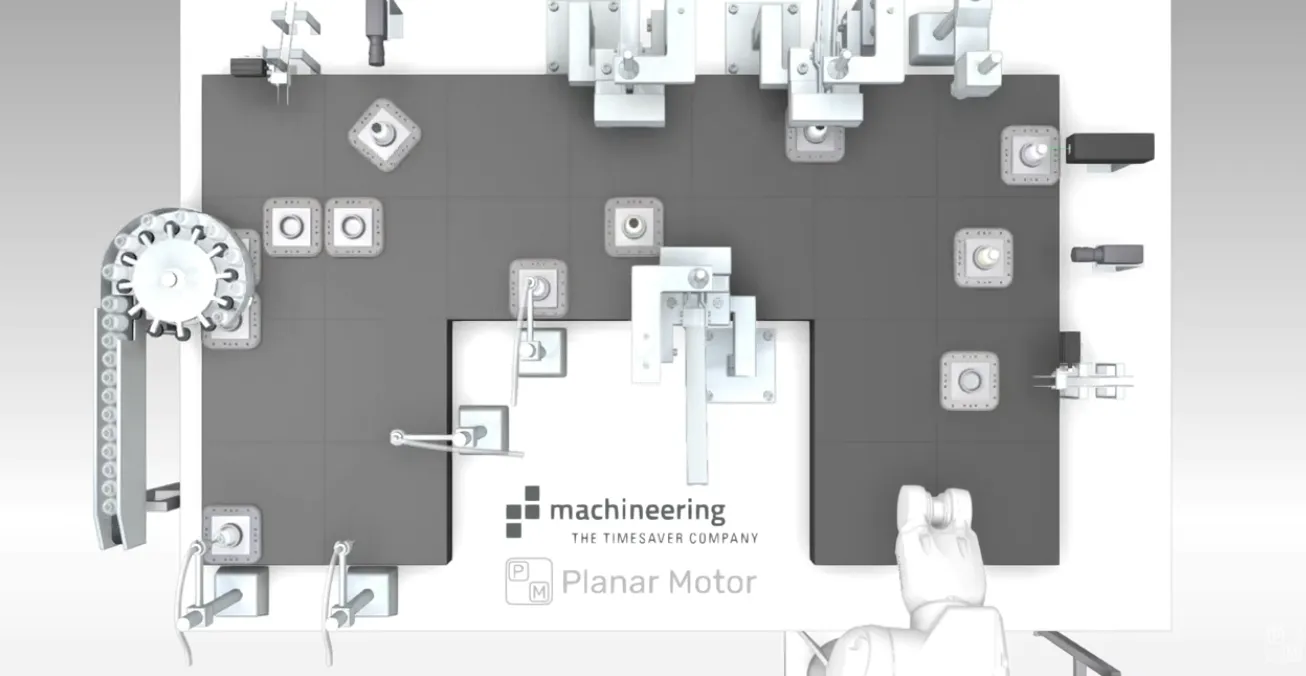
Build Flyway layouts, define stations and motion sequences visually, and validate your system in emulation before touching hardware. Export to Visual Components, iPhysics, or Emulate3D for full-machine simulation.
↓ SEE TOOLS
2
Develop & integrate
Use your existing automation environment (Siemens, Rockwell, Beckhoff, Omron, Keyence, and more) or code directly in Python, C#, MATLAB, or LabVIEW.
↓ SEE PLATFORMS
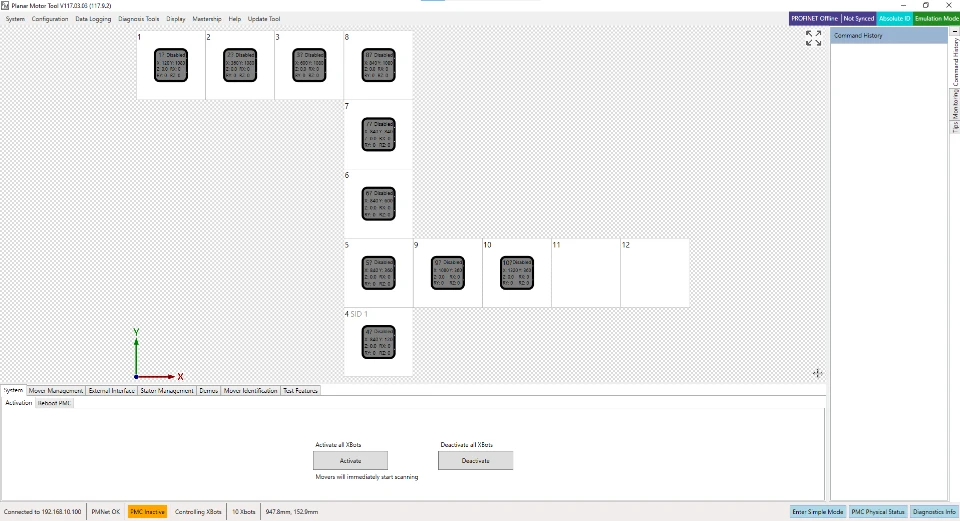
3
Run & produce
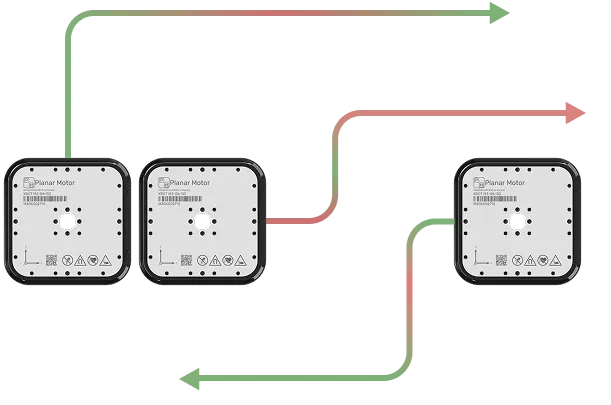
Collision avoidance, traffic management, and automated initialization are built in, ensuring reliable operation across variable conditions. Flexible routing, STO and accident recovery keep uptime high when there are issues in production.
↓ SEE CAPABILITIES