1
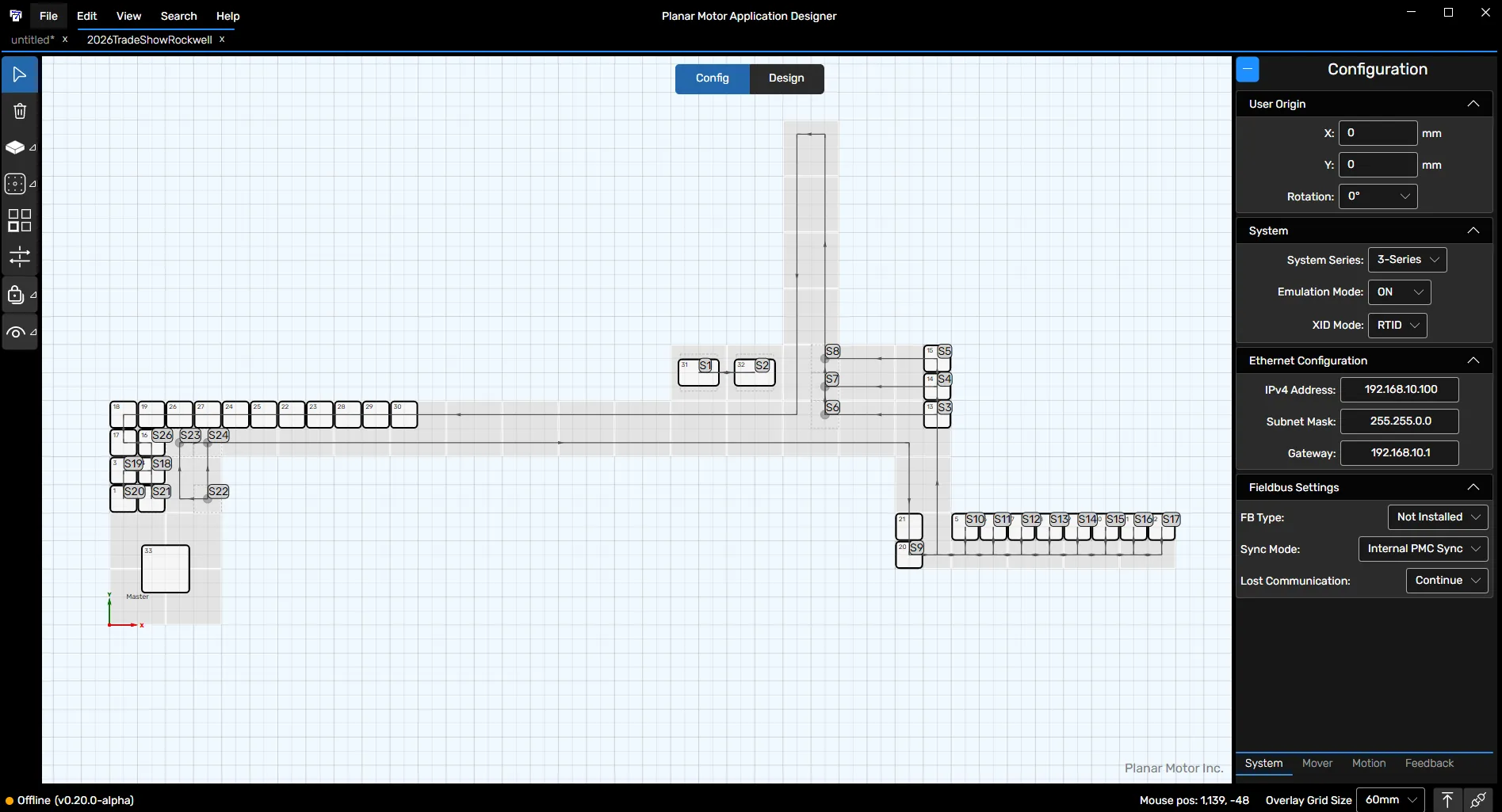
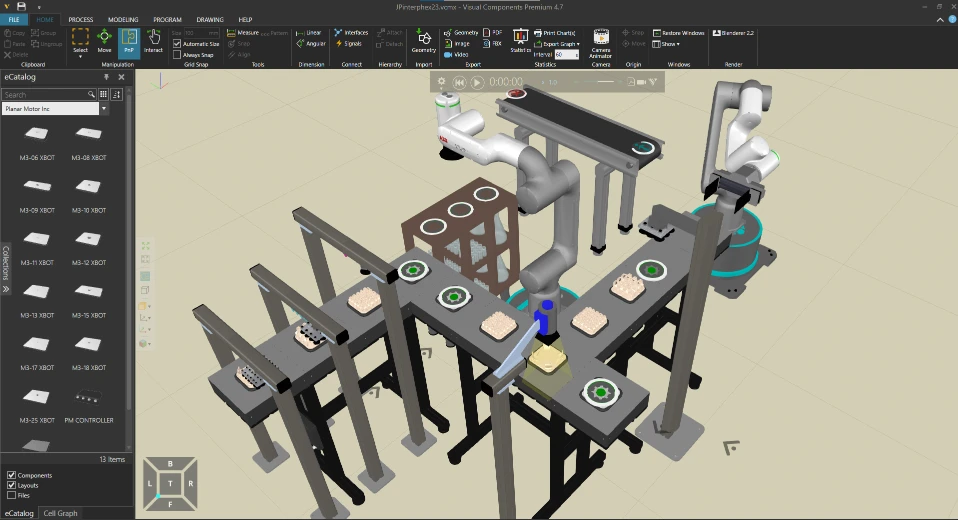
설계 및 시뮬레이션
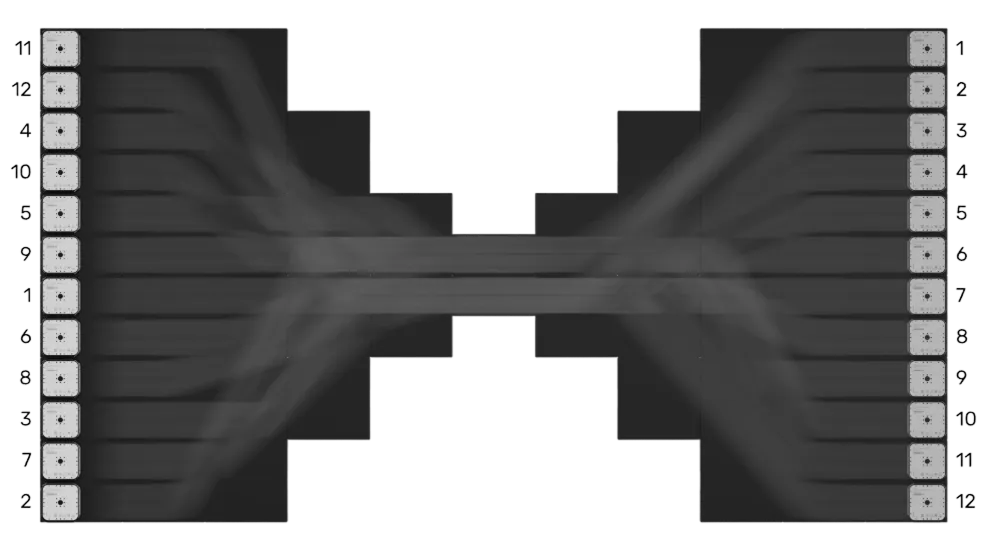
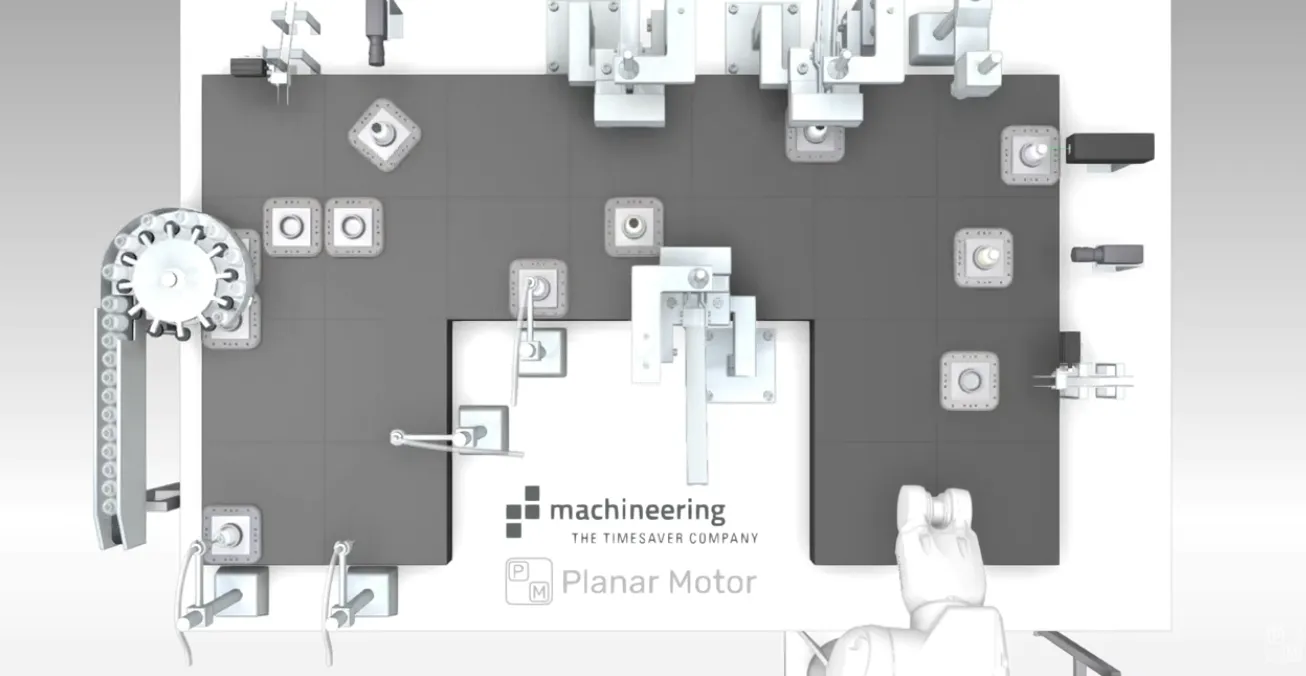
Flyway 레이아웃을 구성하고, 스테이션과 모션 시퀀스를 시각적으로 정의하며, 실제 하드웨어를 다루기 전에 에뮬레이션 환경에서 시스템을 검증하세요. Visual Components, iPhysics, Emulate3D로 내보내 장비 전체 단위의 시뮬레이션을 수행할 수 있습니다.
↓ 툴 보기
2
개발 및 연동
Siemens, Rockwell, Beckhoff, Omron, Keyence 등 기존에 사용하던 자동화 환경을 그대로 활용하거나, Python, C#, MATLAB, LabVIEW로 직접 코딩할 수 있습니다.
↓ 플랫폼 보기
3
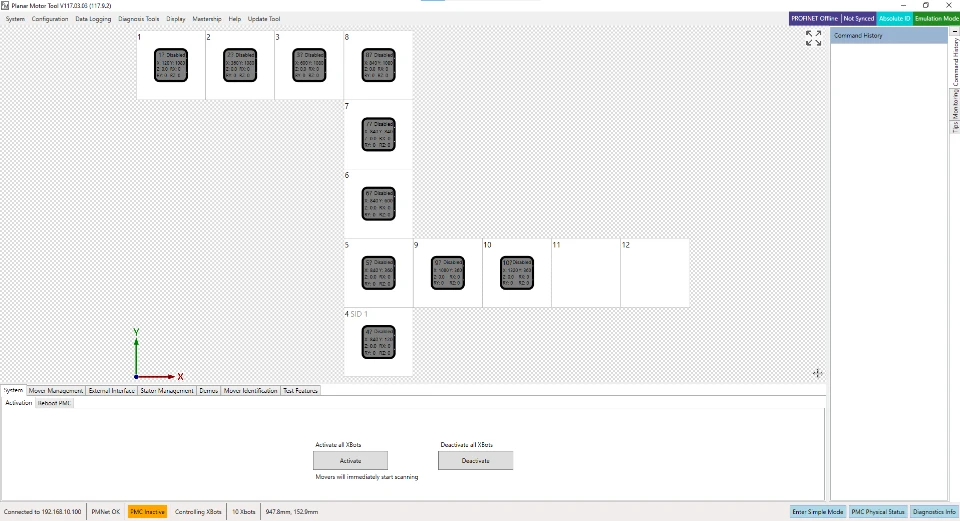
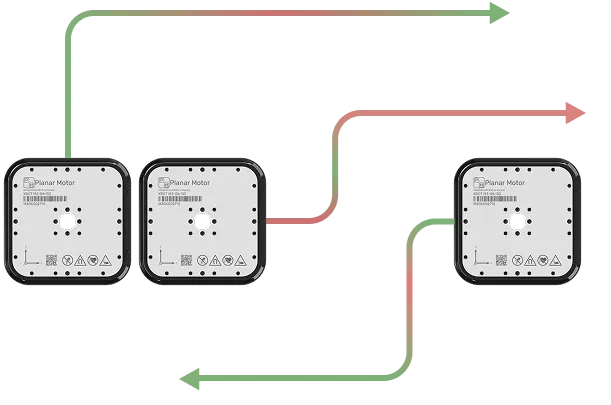
운영 및 생산
충돌 회피, 트래픽 관리, 자동 초기화 기능이 기본 탑재되어 다양한 조건에서도 안정적인 운영을 보장합니다. 유연한 경로 설정, STO(Safe Torque Off), 사고 복구 기능이 생산 중 문제가 발생하더라도 높은 가동률을 유지해 줍니다
↓ 기능 보기