1
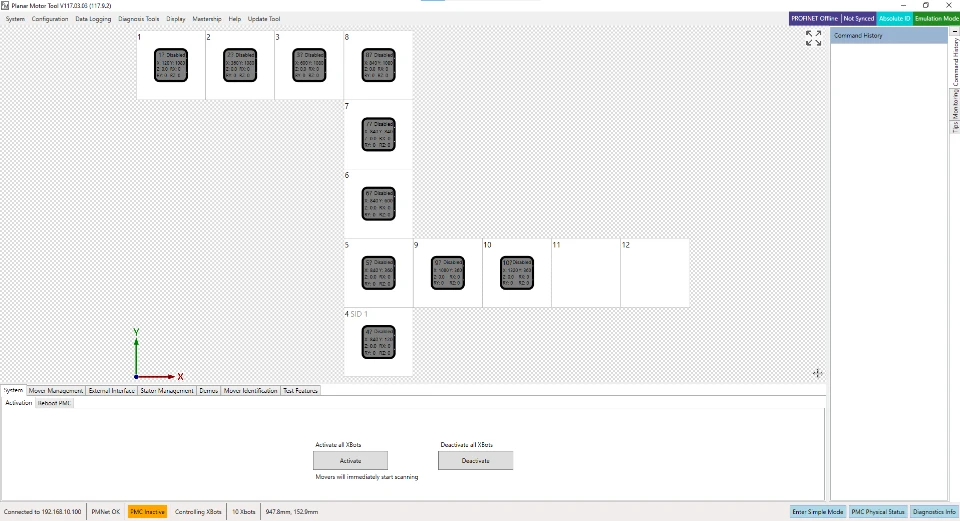
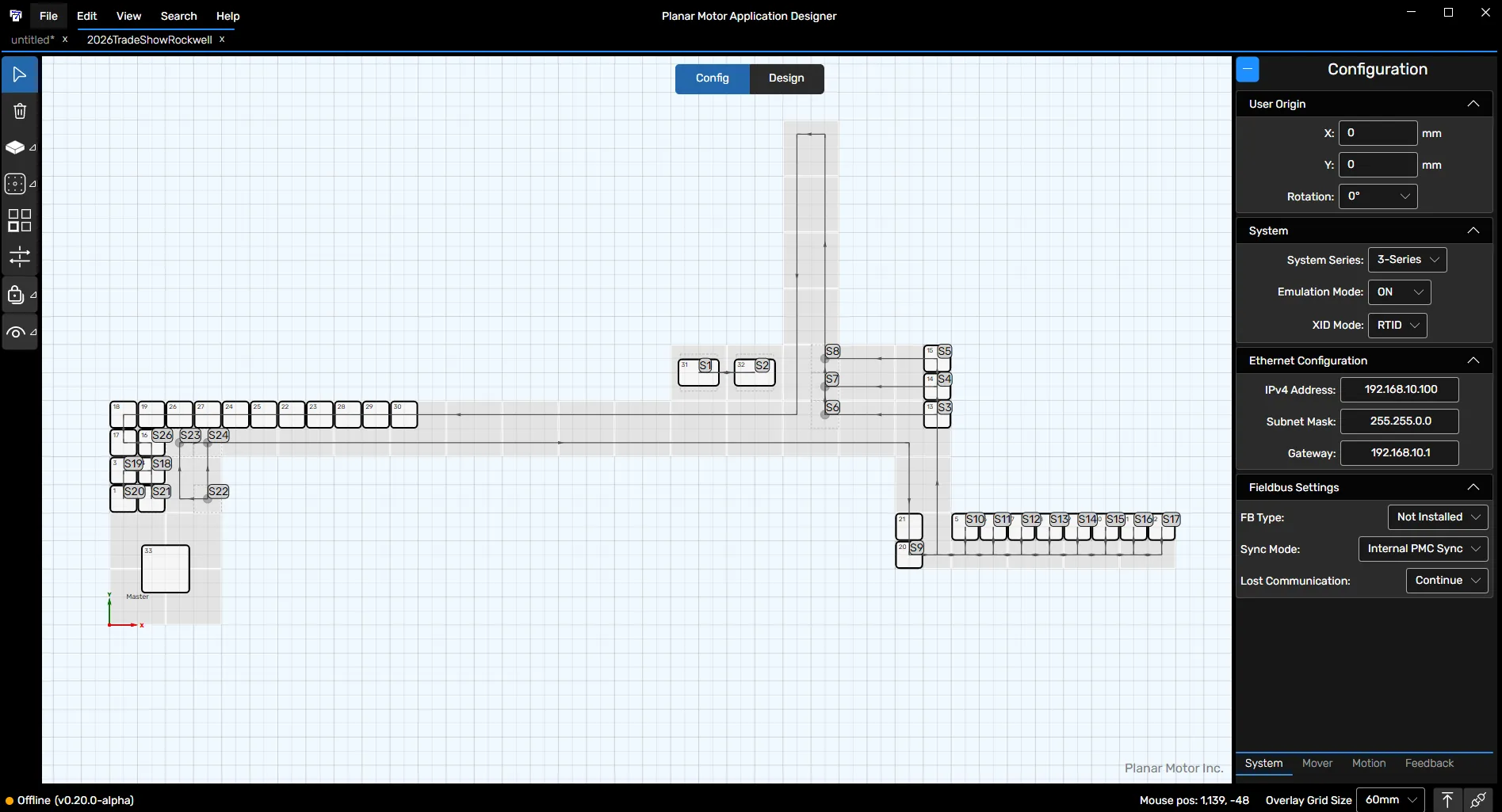
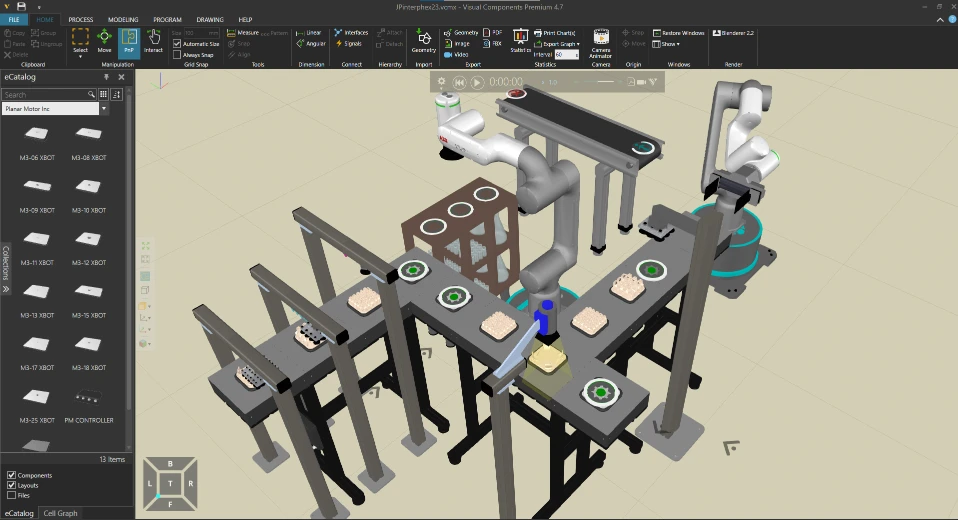
Diseñar y simular
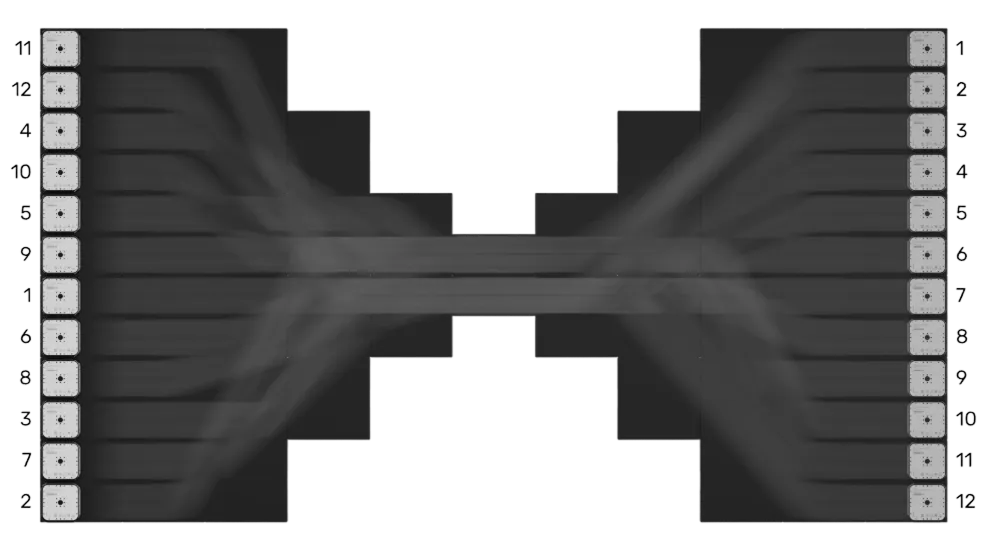
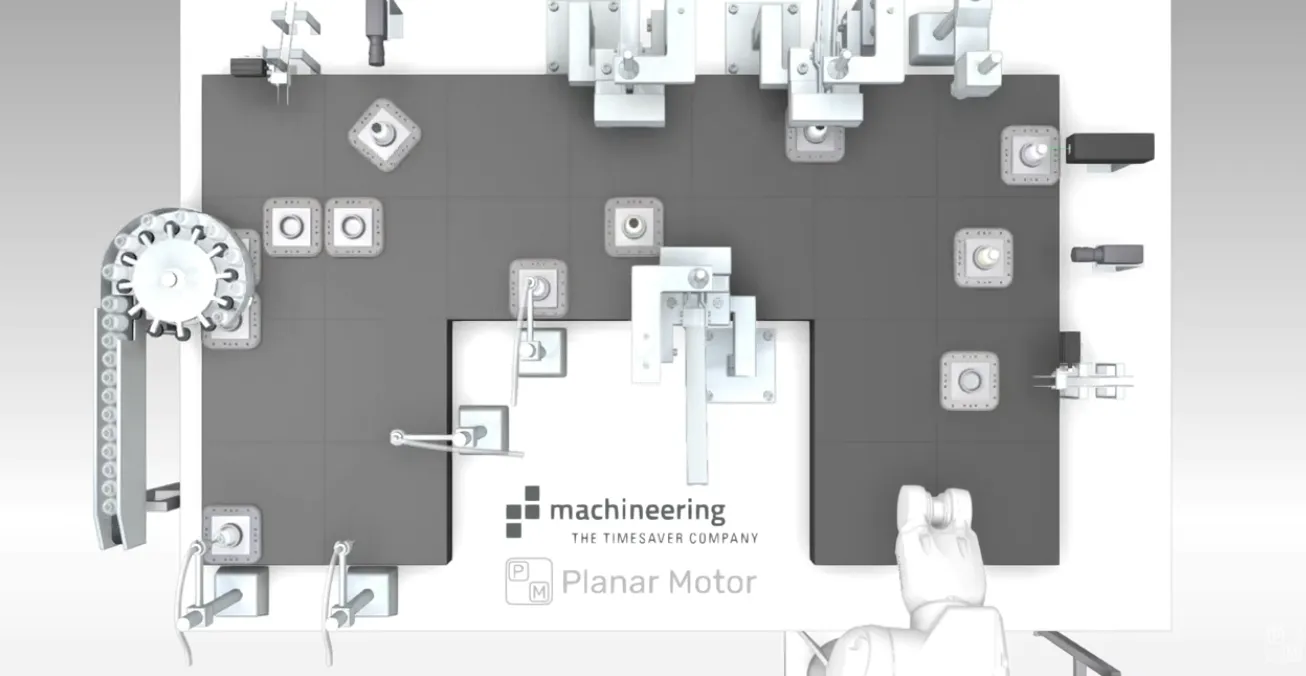
Planar Motor Tool y Application Designer: construya layouts de Flyway, defina estaciones y secuencias de movimiento de forma visual, y valide su sistema en emulación antes de utilizar hardware real. Exporte a Visual Components, iPhysics o Emulate3D para simulación completa de la máquina.
↓ VER HERRAMIENTAS
2
Desarrollar e integrar
PMLib: una biblioteca unificada compatible con más de 25 plataformas de PLC y PC. Utilice su entorno de automatización actual (Siemens, Rockwell, Beckhoff, Omron, Keyence, y más) o programe directamente en Python, C#, MATLAB o LabVIEW. Su plataforma. Su decisión.
↓ VER PLATAFORMAS
3
Ejecutar y producir
Anticolisión a nivel de firmware con reconocimiento de estereotipos, conducción automática para la inicialización del sistema, gestión de zonas, stream mode e integración con transportadores convencionales: el PMC gestiona la complejidad del sistema para que su código se centre exclusivamente en el proceso.
↓ VER CAPACIDADES