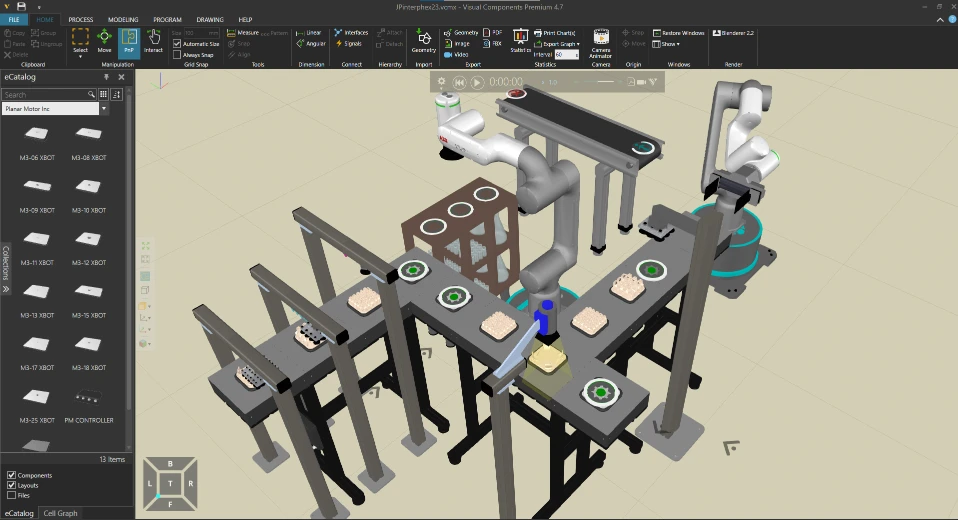
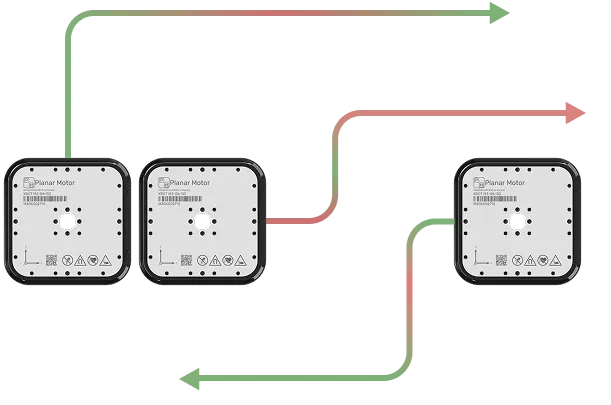
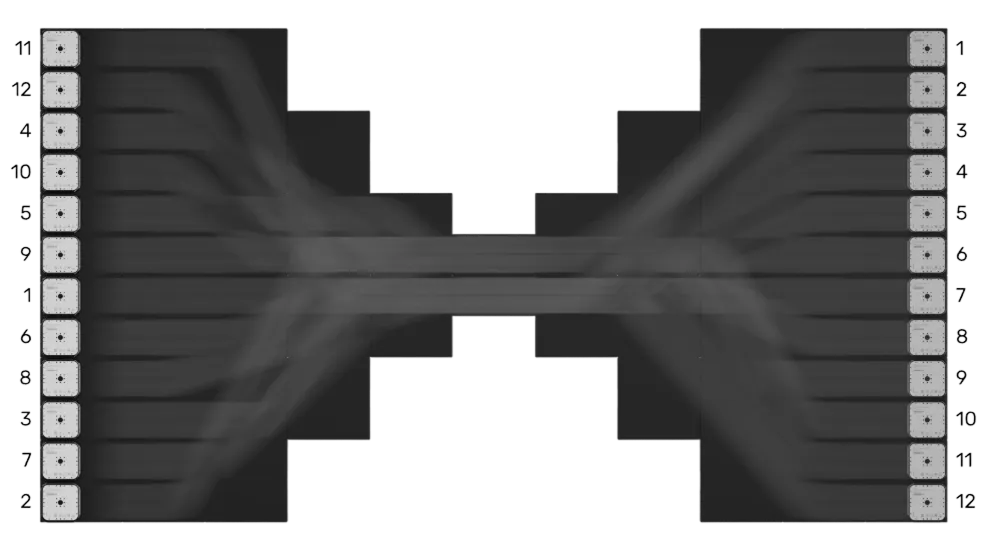
Collision avoidance that knows what you're carrying
Every Planar Motor system includes firmware-level collision avoidance — it's always on, requires zero programming, and works at hardware speed. But what makes it exceptional is stereotype awareness.
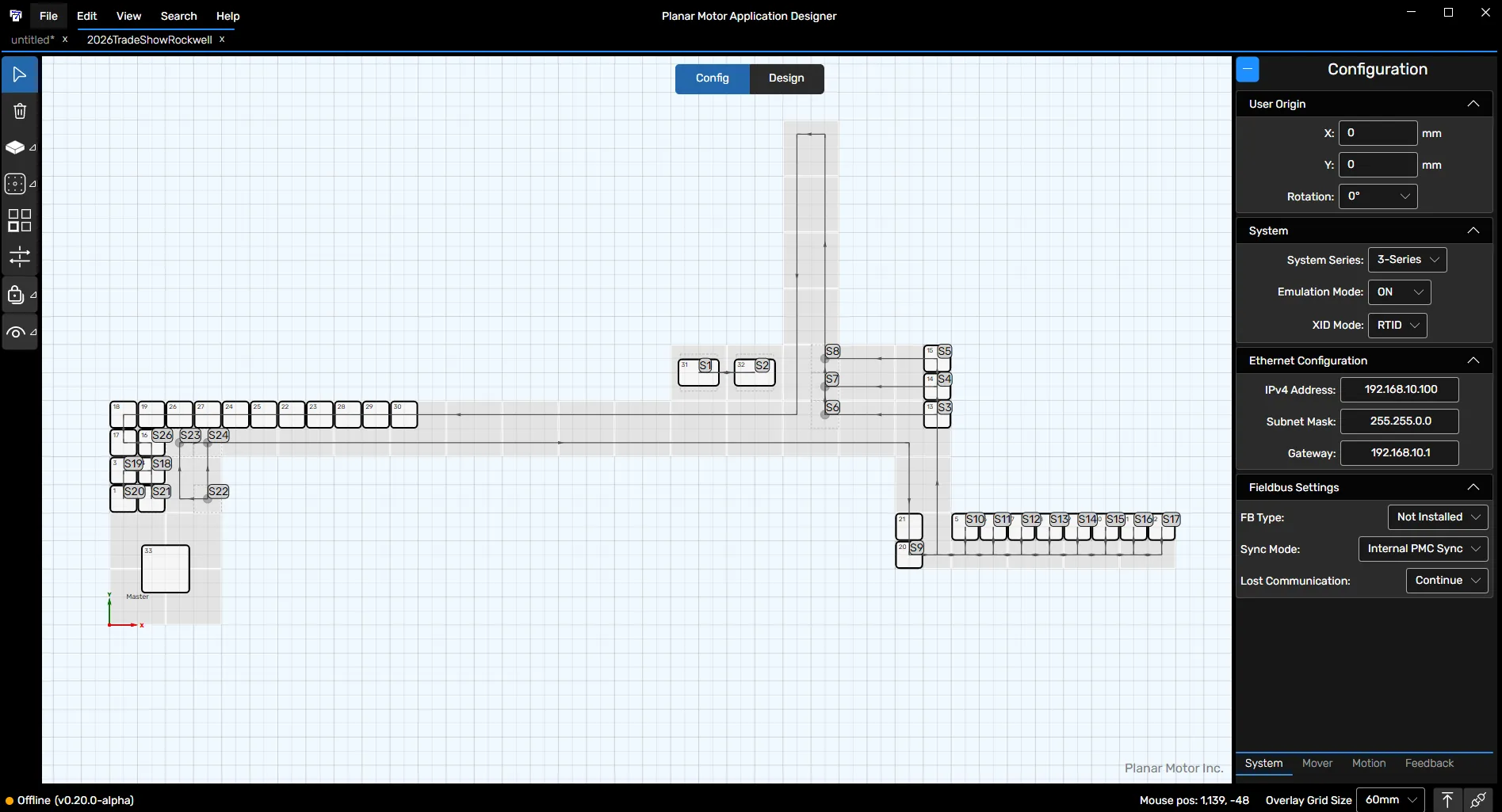
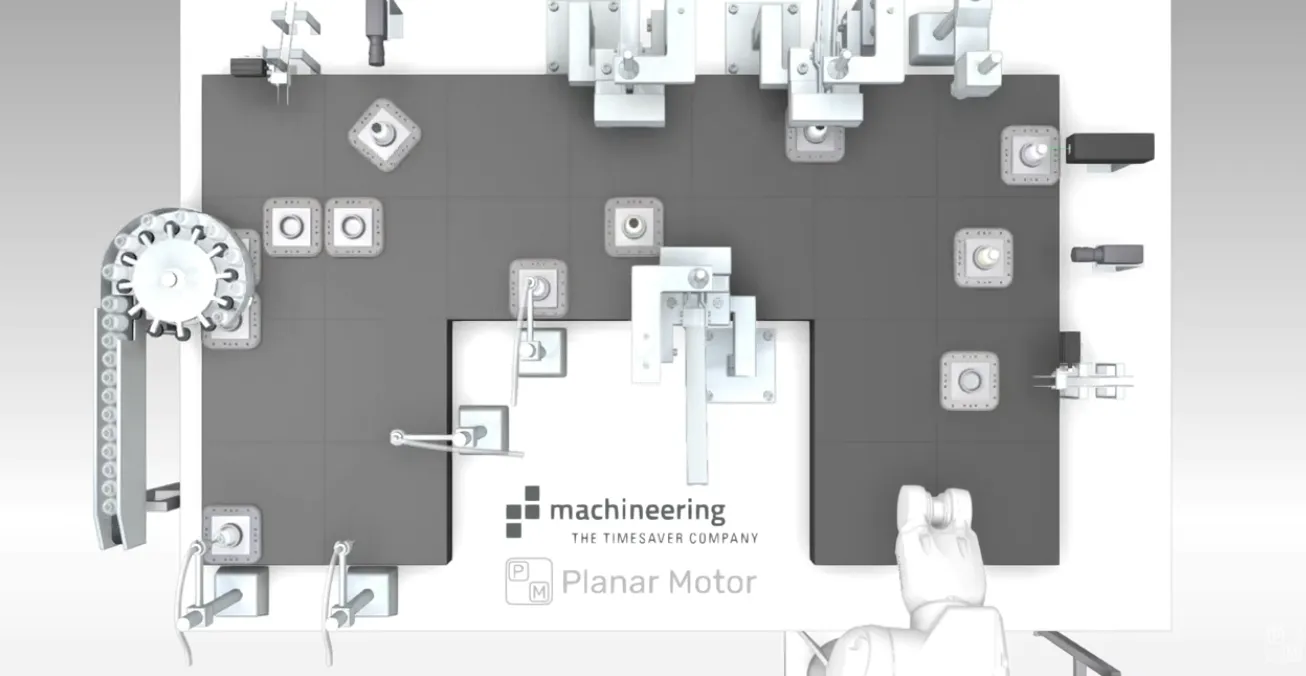
Design & simulate
Every Planar Motor system includes firmware-level collision avoidance — it's always on, requires zero programming, and works at hardware speed. But what makes it exceptional is stereotype awareness.
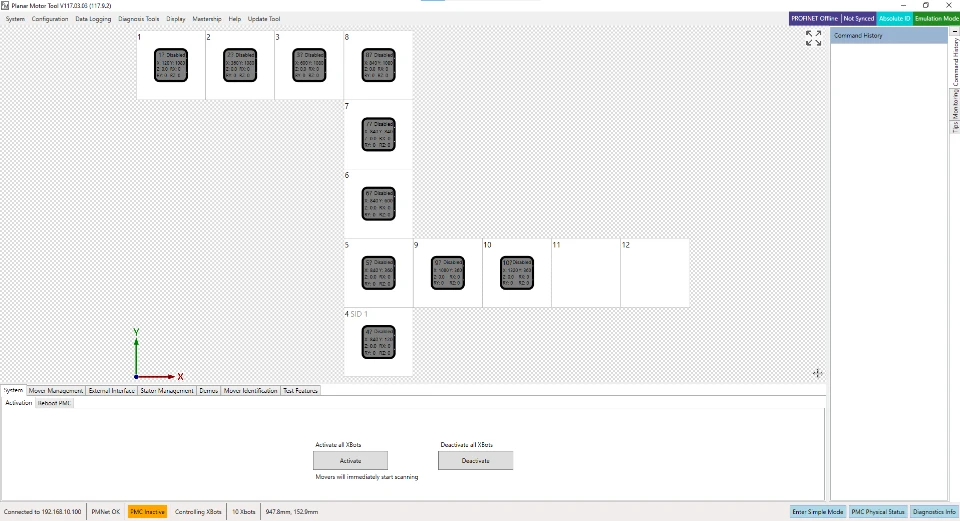
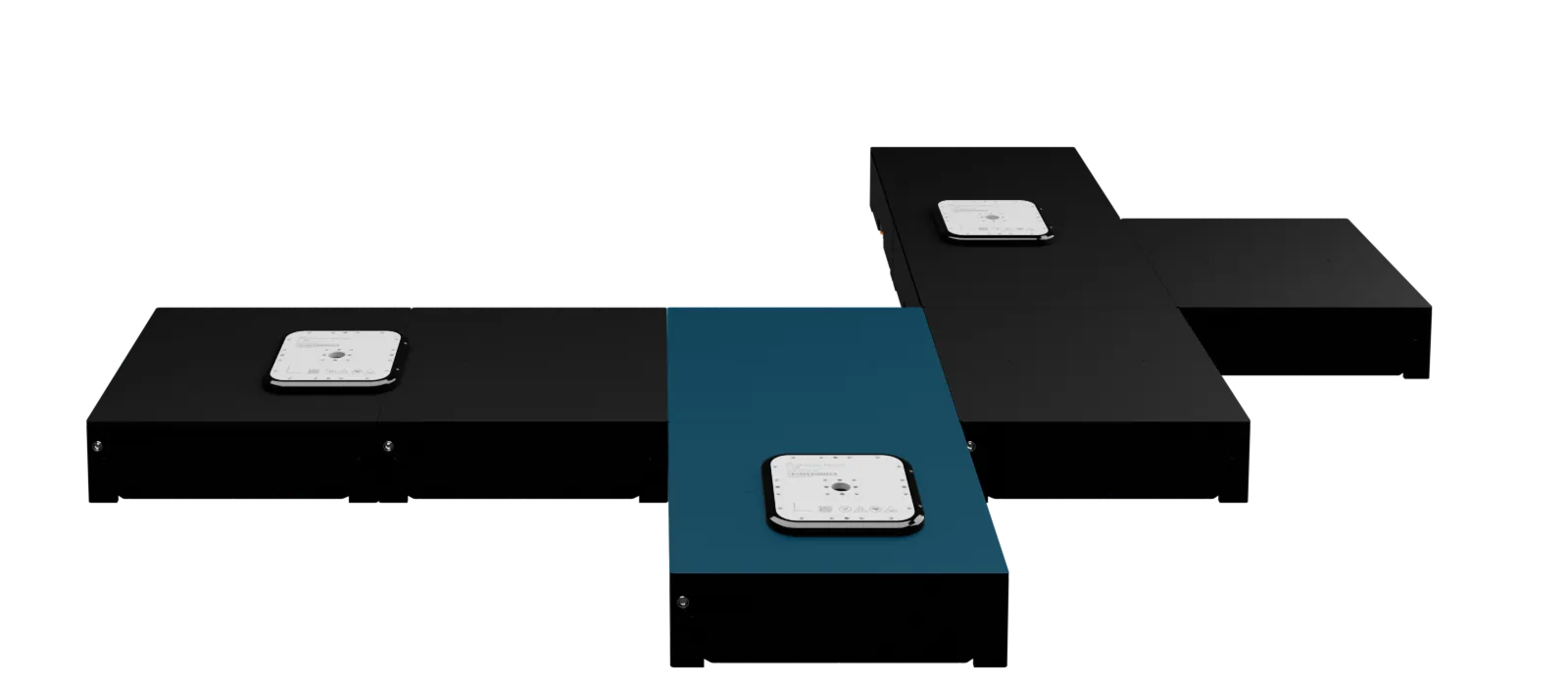
Collisions handled automatically
The PMC factors in every stereotype when calculating safe distances. Wide or overhanging payloads? They'll never collide — guaranteed at the firmware level.